Effective Thickness
The paper Robotic Fabrication of Components for Ceramic Shell Structures, presented at the IASS 2014 Symposium, provides a detailed overview of the project.
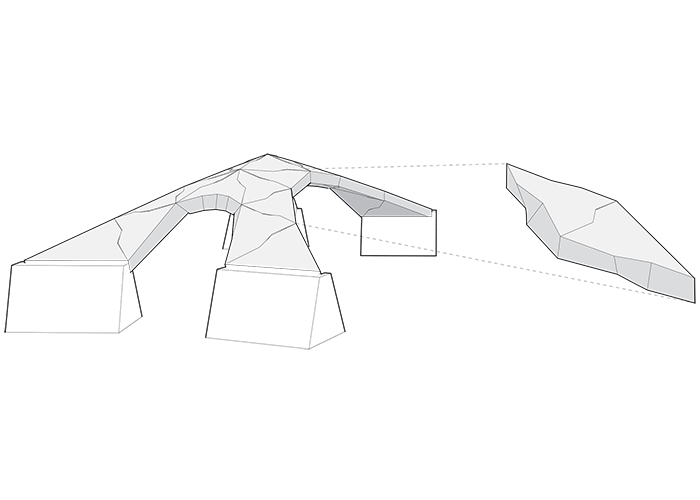
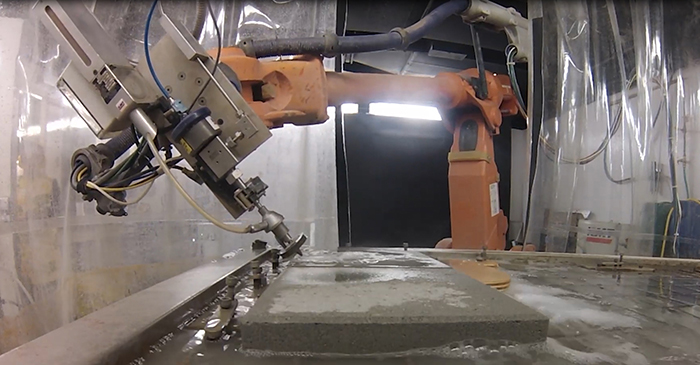
This research investigates the assembly of funicular shell structures using a single layer of flat ceramic tiles. The objective is to synthesize recent advances in structural prediction software with existing means and methods of on-site assembly. The primary area of investigation is at the scale of the tectonic unit - most specifically how introduction of geometric intelligence at the scale of the unit can simplify the assembly of forms that are difficult to realize in the context of modern construction. The project simulates an industrial production scenario in which components for a given shell structure can be fabricated using a wire cutter-equipped 6-axis robotic arm. It aims to increase the adaptability and applicability of ceramic shell structures. with Malika Singh, Ling-Li Tseng and Yingyi Wang